通过与众多客户的沟通,很多人搞不清这些GPS定位方式的概念,达盟GPS小编整理一下,
试图用简单的语言让大家都能了解这些概念。
所谓GPS辅助定位,就是在GPS设备在定位之前,通过网络获取当前GPS设备位置的GPS卫星的星历/历书
(参考前文– 《星历与历书的区别 ? 星历/历书与GPS三种启动模式的关系》 )的数据,以加快定位的方法。
即加快TTFF(Time To First Fix–首次定位时间)的方法。
GPS,北斗,GLONASS,GALILEO等的辅助定位类似。
每家GPS芯片厂商的定义的名称不同,但基本原理都差不多。
下面以AGPS(Assisted GPS,辅助GPS)为例说明一下原理与流程。
我们知道,GPS接收器(这里GPS设备,GPS定位器都是一个意思)的TTFF慢是GPS的一个硬伤,
其原因就是因为GPS接收器必须搜索到4颗有效的卫星信号才能3D定位,必须从24颗GPS卫星中一个一个搜索,
这是TTFF时间长的主要原因。
通过AGPS,从蜂窝网络/IP网络下载当前位置的可用卫星信息(包含当地区可用的卫星频段、方位、仰角等信息),
从而避免了全频段大范围搜索,使首次搜星速度大大提高,时间由原来的几分钟减小到十几秒钟。
AGPS流程
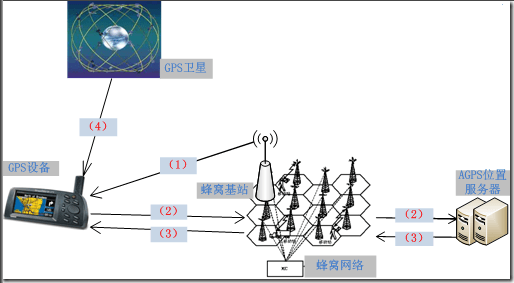
如上图所示,AGPS中从定位启动到GPS接收器找到可用卫星的基本流程如下:
(1)设备从蜂窝基站获取到当前所在的小区位置(即一次COO定位,Cell of Origin,即基于Cell-ID的定位技术)
(2)设备通过蜂窝网络将当前蜂窝小区位置传送给网络中的AGPS位置服务器
(3)APGS位置服务器根据当前小区位置查询该区域当前可用的卫星信息(包括卫星的频段、方位、仰角等相关信 息),并返回给设备
(4)GPS接收器根据得到的可用卫星信息,可以快速找到当前可用的GPS卫星
至此,GPS接收器已经可正常接收GPS信号,GPS初始化过程结束。AGPS对定位速度的提高就主要体现在此过程中。
接下来过程与传统GPS定位完全相同,GPS接收器接收当前可用卫星GPS信号,解调并进行一定处理,根据处理后的信息进行位置计算,得到最终的位置坐标。
现在市场上主流GPS芯片为MTK,U-Blox。
AGPS为2个厂家都使用过的名称。EPO,HotStill为MTK定义的方式。
与u-blox的AssistNow OffLine,AssistNow Autonomous 对应。
其中HotStill与AssistNow Autonomous不一定要联网获取数据,一般根据接收到的广播星历算出未来的星历,这2种方式因为精度低所以使用的比较少。
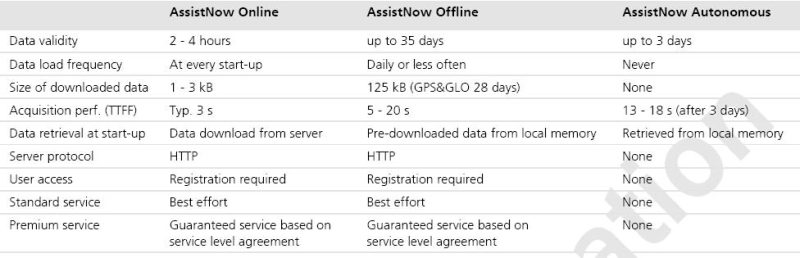
u-blox的AGPS 升级成 AssistNow Online。
下面2个表是MTK与U-Blox的GPS辅助定位的精简总结表。
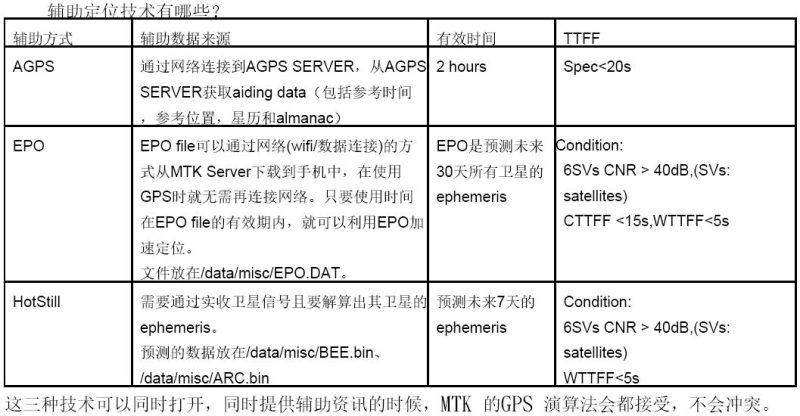
MTK辅助定位方式:
U-BLOX辅助定位方式: